
Descrizione delle fasi di realizzazione e programmazione
Obiettivo: Costruire un robot con pochi euro in grado di muoversi evitando gli ostacoli in stile wall-e

Componentistica impiegata:
- Arduino mega 2560 (anche Arduino Uno andava bene ma ho preferito comprare il modello più performante). L'ho preso su ebay a pochi euro qui.
- Due servi a rotazione continua per la locomozione (ne ho usato due normali che ho opportunamente modificato. Sul web e su youtube trovate numerosi video che descrivono come fare la modifica)
- Due ruote in plastica per servi
- Un sensore ultrasonico HC-SR04 per la rilevazione degli ostacoli. L'ho preso su ebay
- Un microservo per la rotazione del sensore
- Una piccola breadboard per le connessioni
- Un ruotino
- Un display LCD 16x2 con modulo seriale. Io ho preso il gravitech ma ne esistono numerosi sul web.
- Il telaio è stato ricavato dalla struttura di alluminio di un alimentatore bruciato per LED opportunamente ritagliato
- Il supporto per il sensore HC-SR04 sul servo è stato ottenuto da una lastrina di alluminio opportunamente ritagliata e piegata.
- I cavi di connnessione sono stati recuperati da vecchi case per computer.
Per isolare la scheda Arduino dalla piastra in alluminio, ho impiegato la spugnetta per imbottitura che si trova in genere quando si acquista un componente elettronico.
Al posto dei cingoli (avrei dovuto acquistare appositi kit) ho impiegato i due servomotori con le ruote.
La breadboard è stata fissata al telaio con il biadesivo.
L'LCD è stato bloccato al telaio con la colla a caldo.
Le due parti del telaio sono sostenute da viti filettate e bulloncini.
La programmazione
Sono partito dal codice presente in questo articolo sul web che ho ulteriormente migliorato e personalizzato.
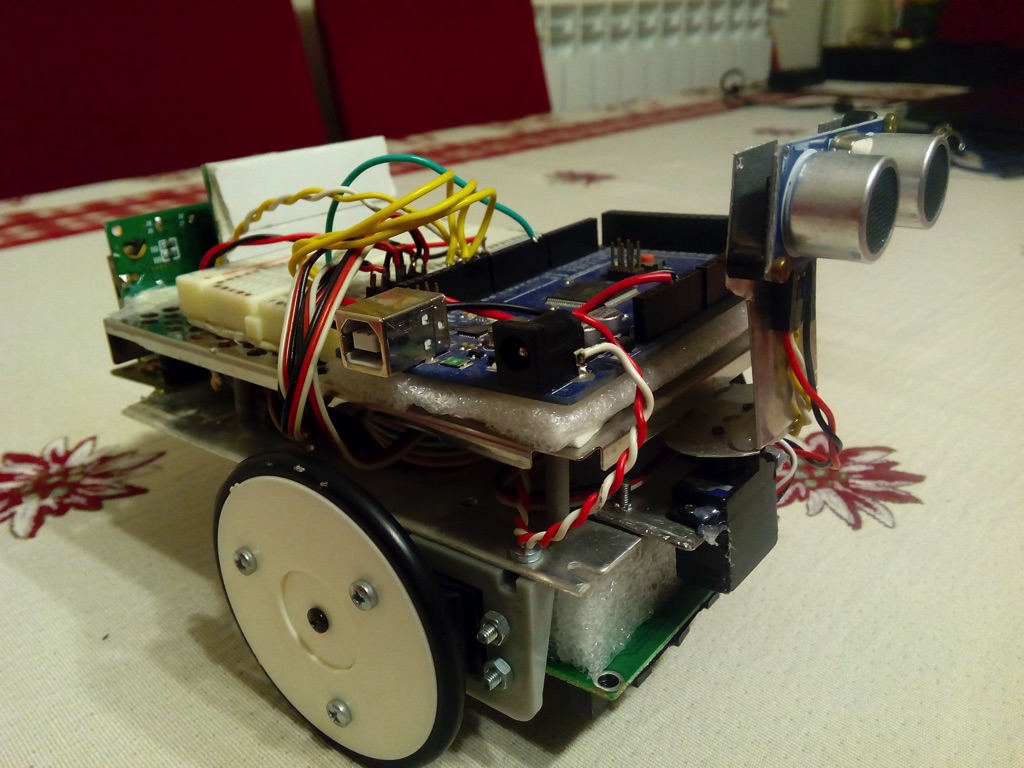
Il robot terminato

La vista frontale con il sensore HC-SR04 montato sul servo.
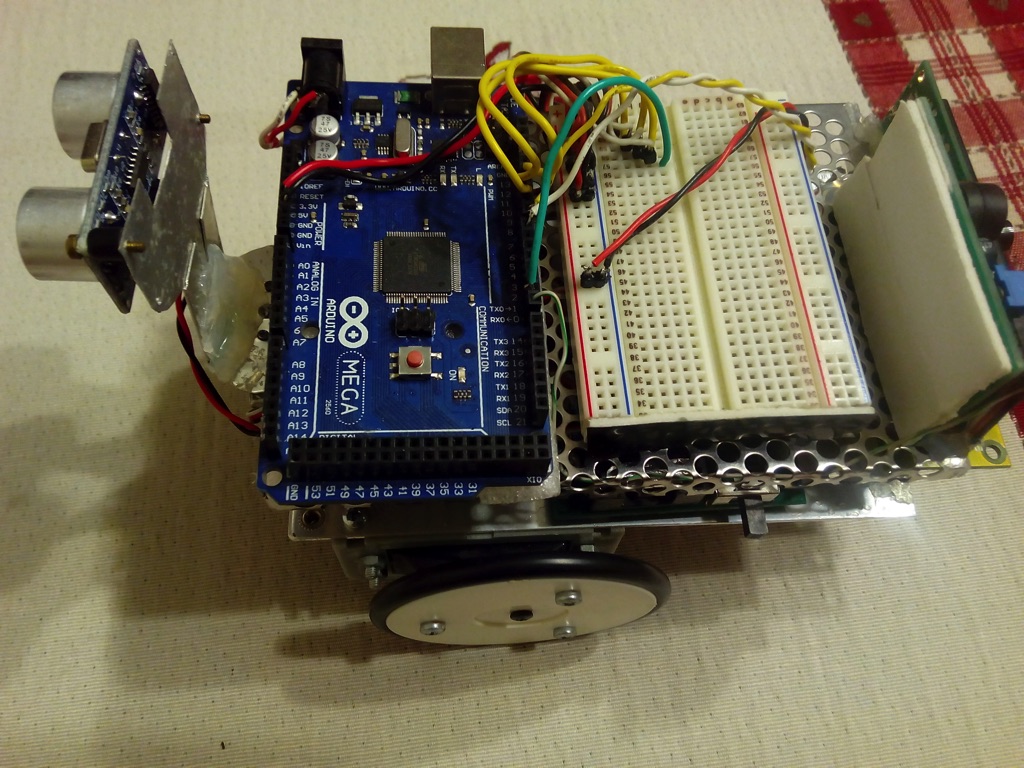
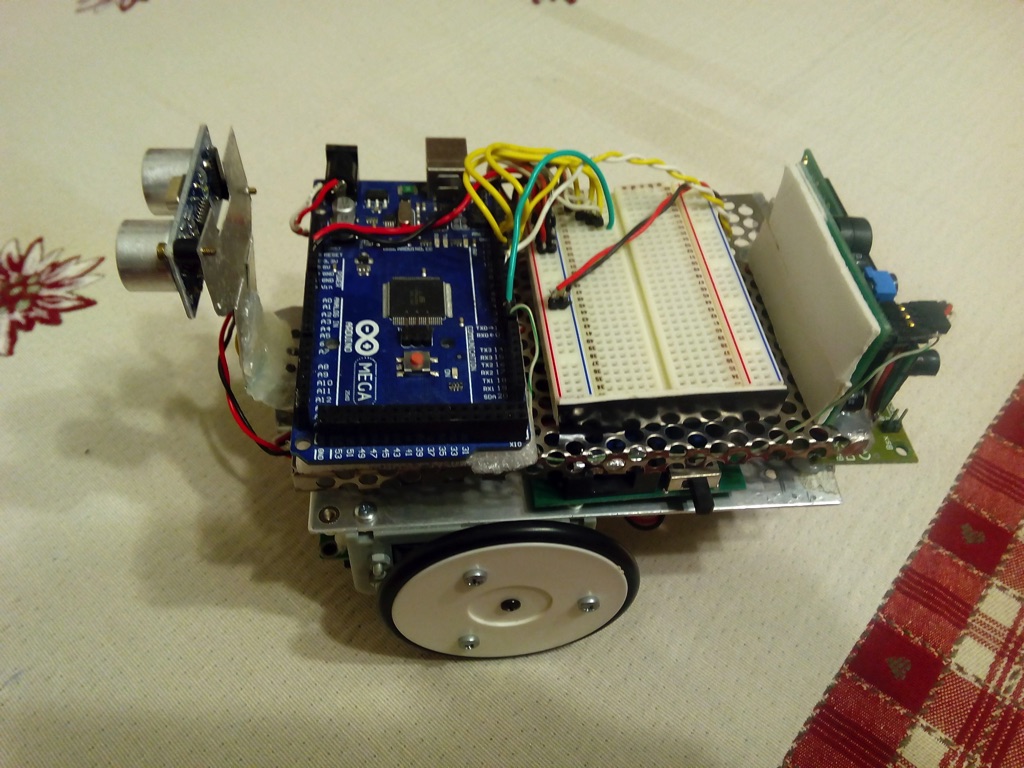
Vista superiore con i collegamenti della scheda arduino e la breadboard a cui confluiscono i cavi del sensore e dei servi
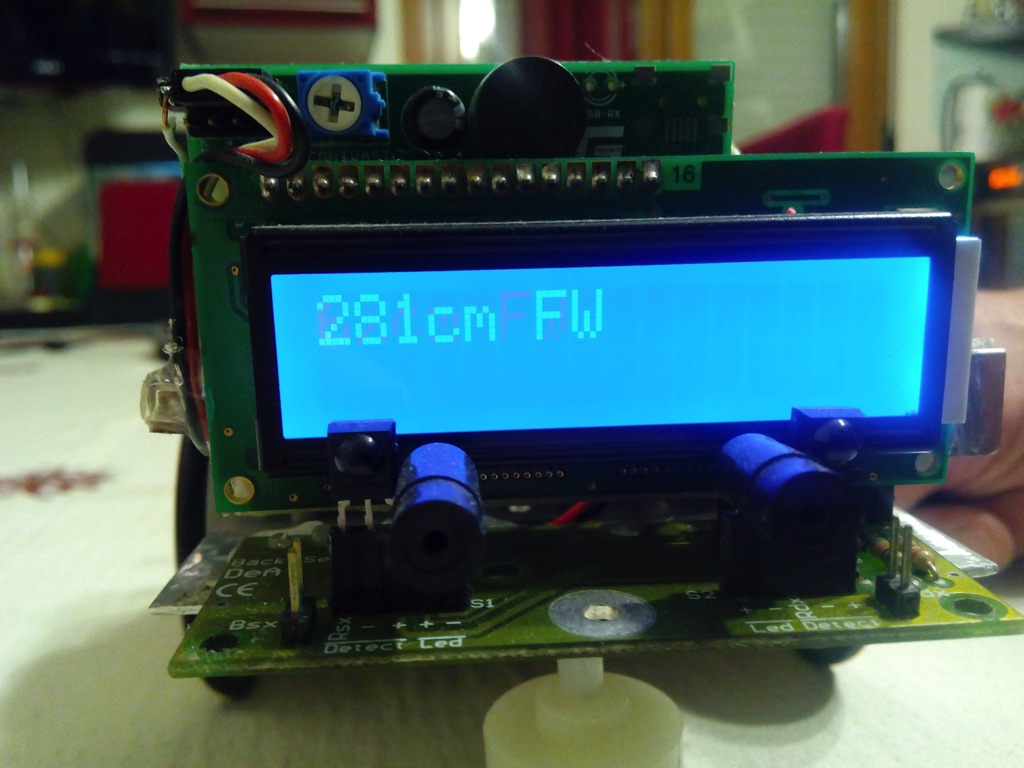
La distanza rilevata dal sensore ultrasonico HC-SR04 viene mostrata nel display. Inoltre il modulo seriale ha anche un cicalino che viene usato per emettere un impulso sonoro quando viene rilevato un ostacolo che si trova alla distanza di soglia prefissata.
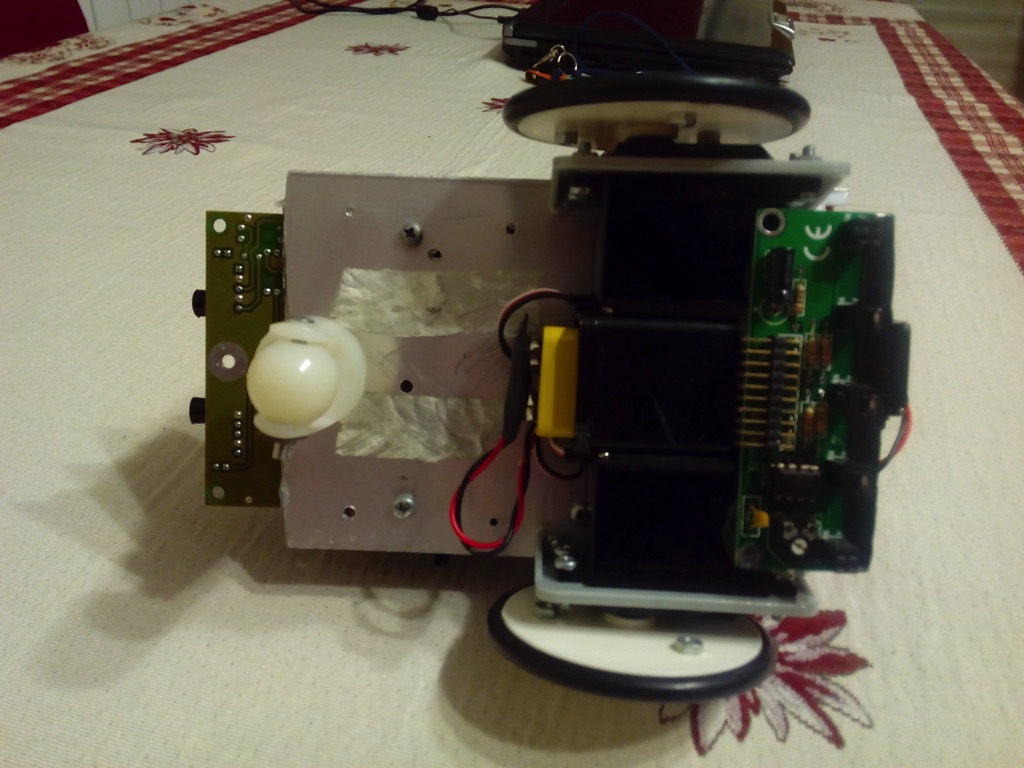
Particolare in cui è visibile il vano alloggio della batteria di alimentazione del robot. Ho impiegato una 9V ma si può usare anche un PowerBank.

Lateralmente è visibile l'interruttore di alimentazione del robot
Dalle foto si nota che sono presenti dei sensori nella parte inferiore (impiegati per il line follower - ma non discussi in questo articolo) e dei sensori IR nella parte posteriore (per migliorare la navigazione . ma non discussi in questo articolo) recuperati da un vecchio modello di robot.
Video