
Componentistica impiegata per la realizzazione Robot:
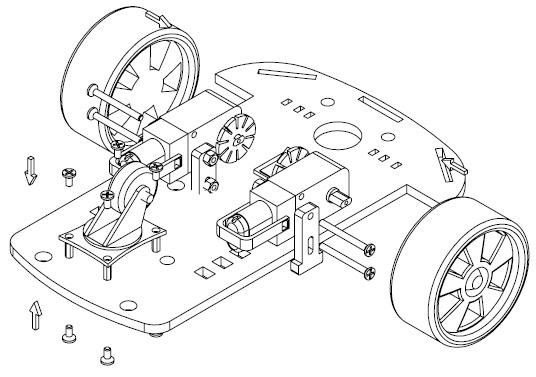
Il telaio, composto da due ripiani è stato autocostruito impiegando materiali di risulta (Pannnelli di Laminato parquet)
Al telaio sono stati praticati numerosi fori per il passaggio dei cavi, per il fissaggio dei componenti ed è stata praticata una forma simile a una "chela" di dimensioni tali ad ospitare la palla da gioco.

Per la locomozione, sono stati impiegati due motori a spazzola.
Rispetto ai servi a rotazione continua permettono un veloce spostamento nell'area di svolgimento della prova.
Sono fissati al telaio con delle viti.
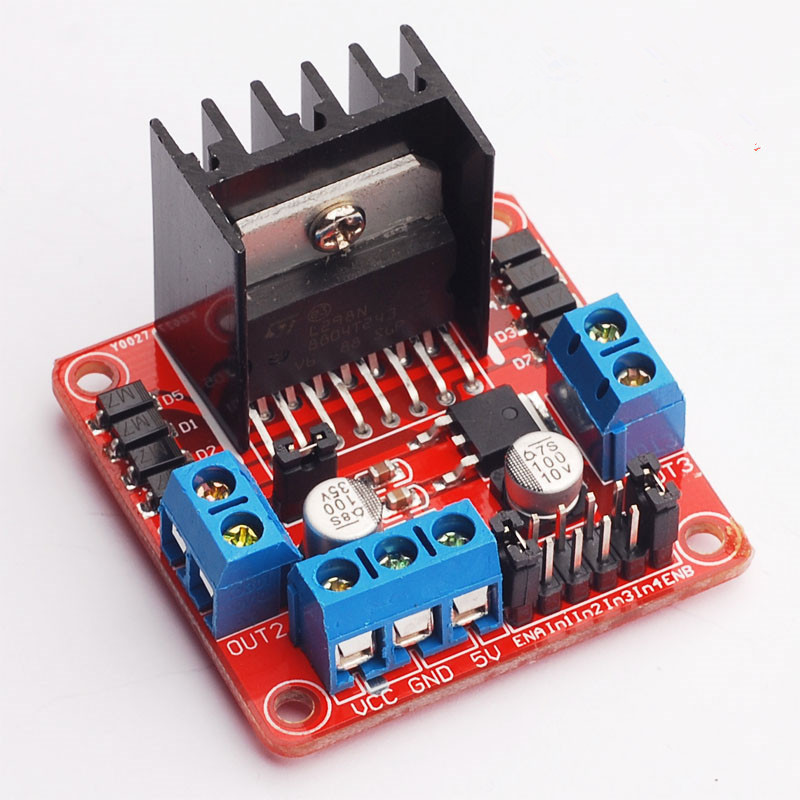
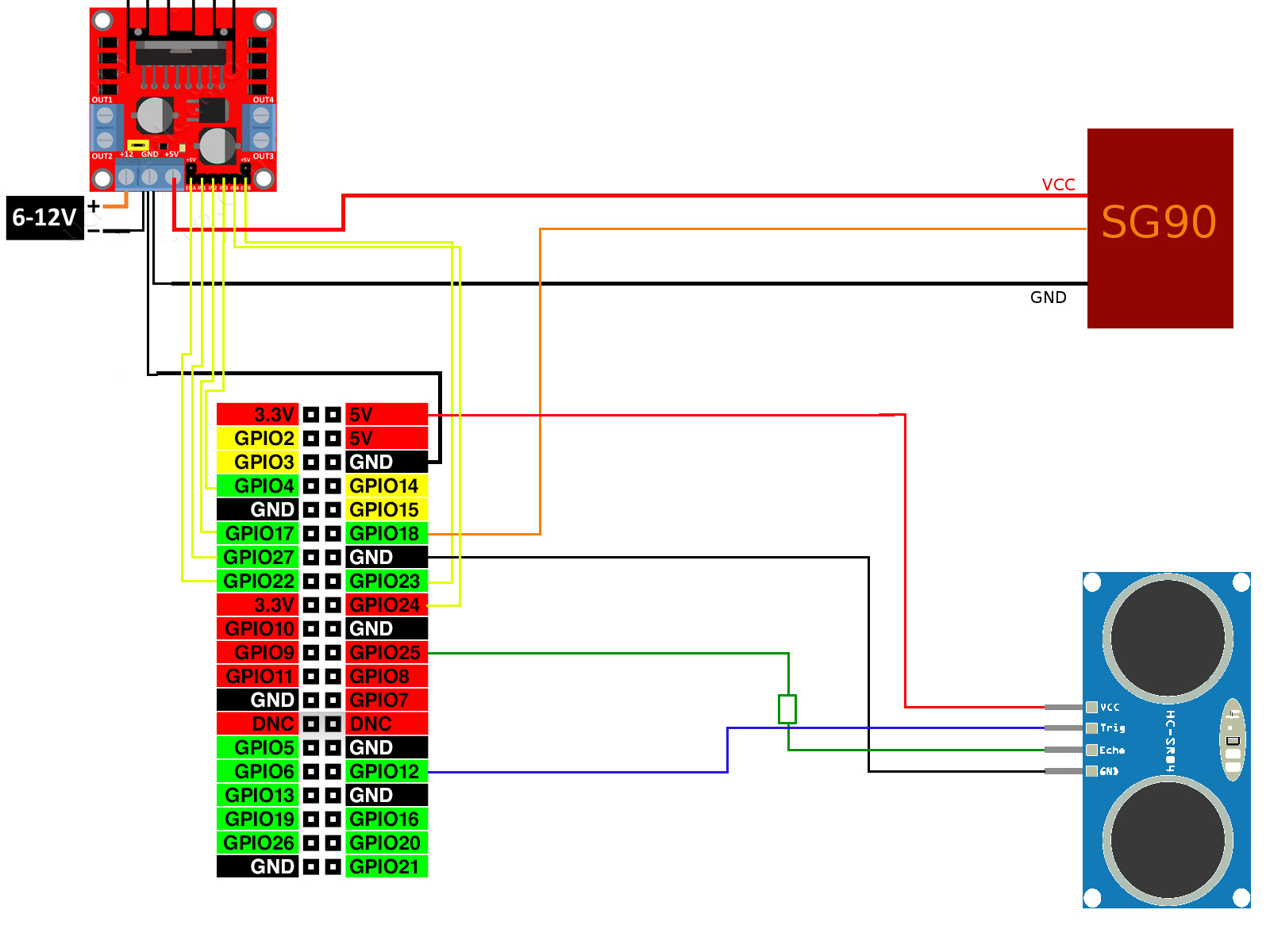
Driver elettronico che grazie a un doppio ponte H, L298N permette il controllo dei motori.
E' costituito da una serie di circuiti e da ponticelli che permettono l'attivazione/disattivazione dei motori collegati
Tutorial e pinout a questo sito.

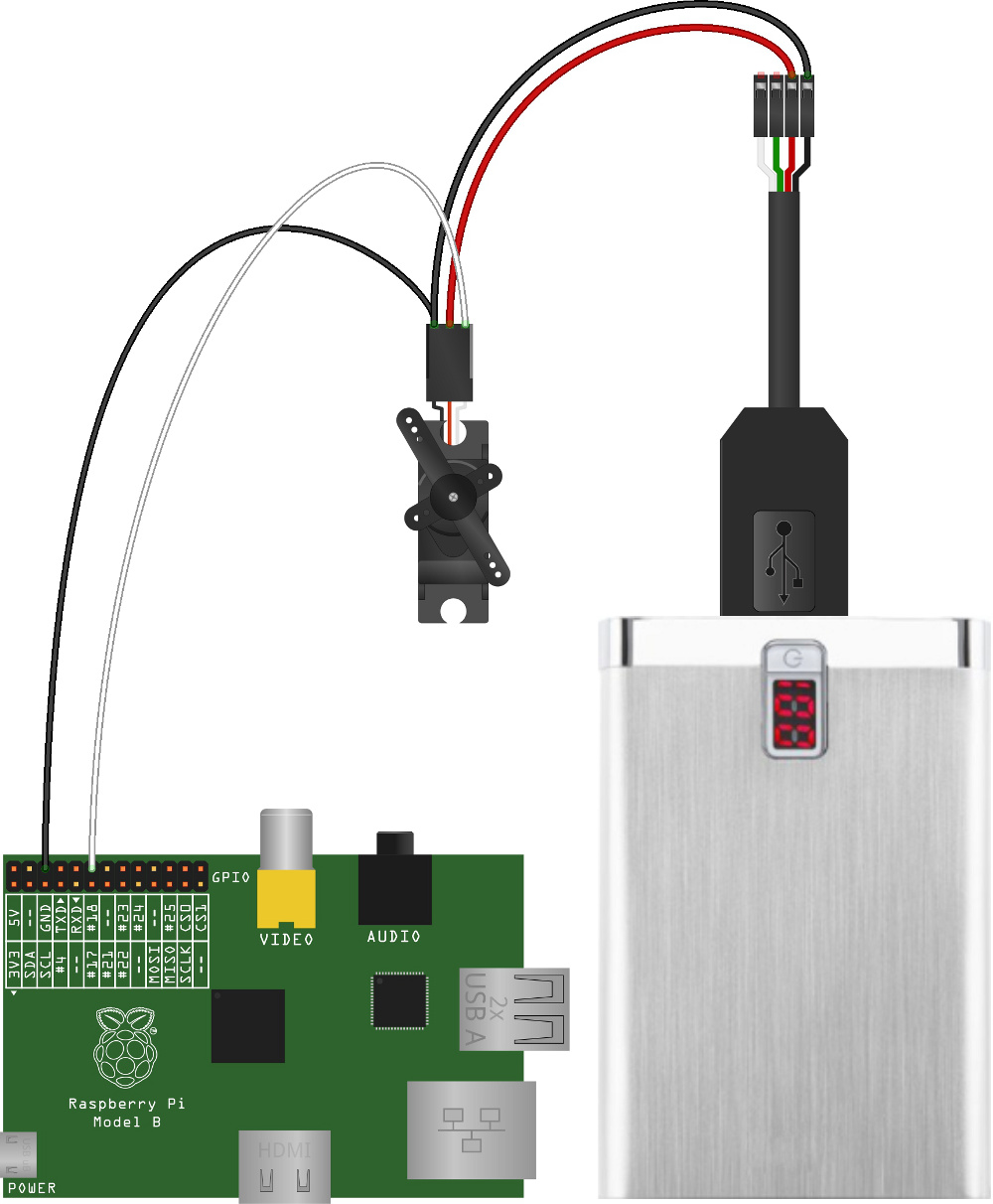
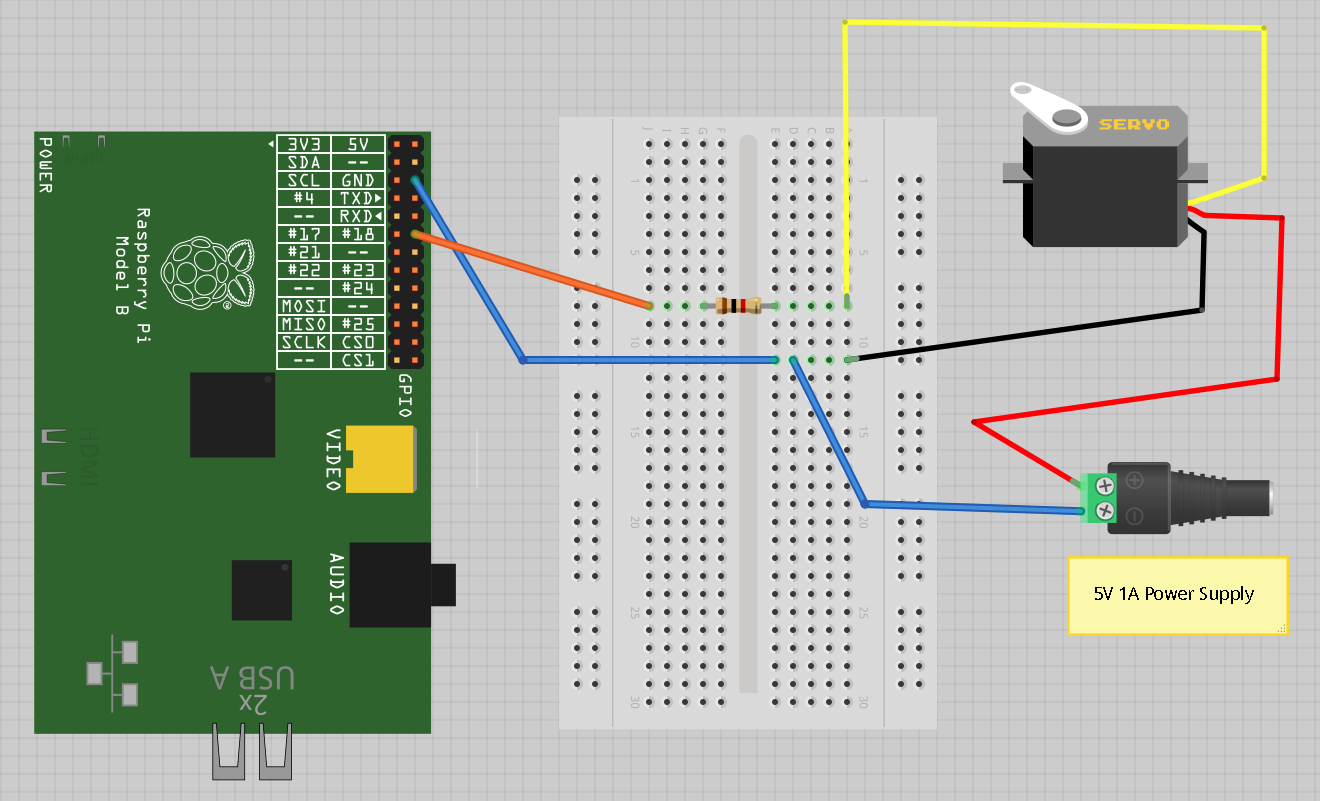
Mini servo impiegato per la rotazione di 180° della webcam e del braccetto anteriore (modello SG90).
E' un servo economico reperibile a pochi euro. Non è a rotazione continua.
Schemi suggeriti per il montaggio con il Raspberry (vedi) e (vedi).
{kind=link}
{kind=link}
Schema per l'alimentazione separata e prelevata dal driver dei motori (vedi).
{kind=link}

Sensore sonar HC-SR04 impiegato per la rilevazione degli ostacoli (in questo caso le pareti del campo)
Pinout e datasheet a questo sito.
Per il collegamento con il Raspberry usare un partitore di tensione (vedi schema).

Webcam: rappresenta l'occhio elettronico del Robot.
Le immagini acquisite sono elaborate dal software sul Raspberry PI del Robot.
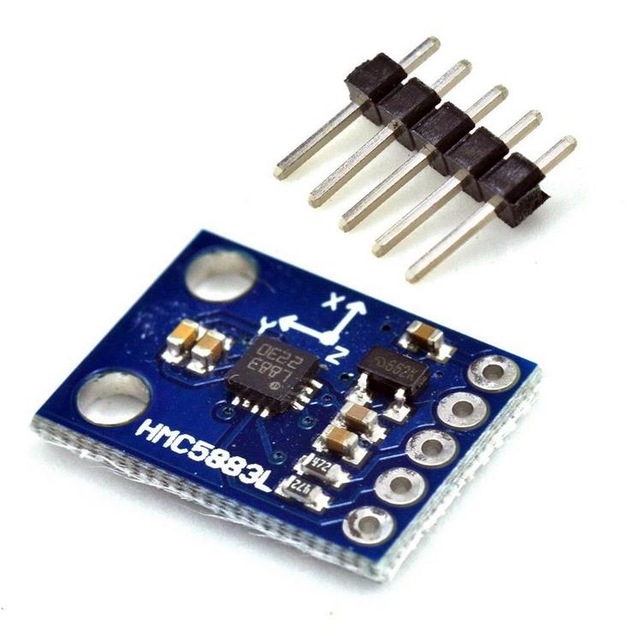
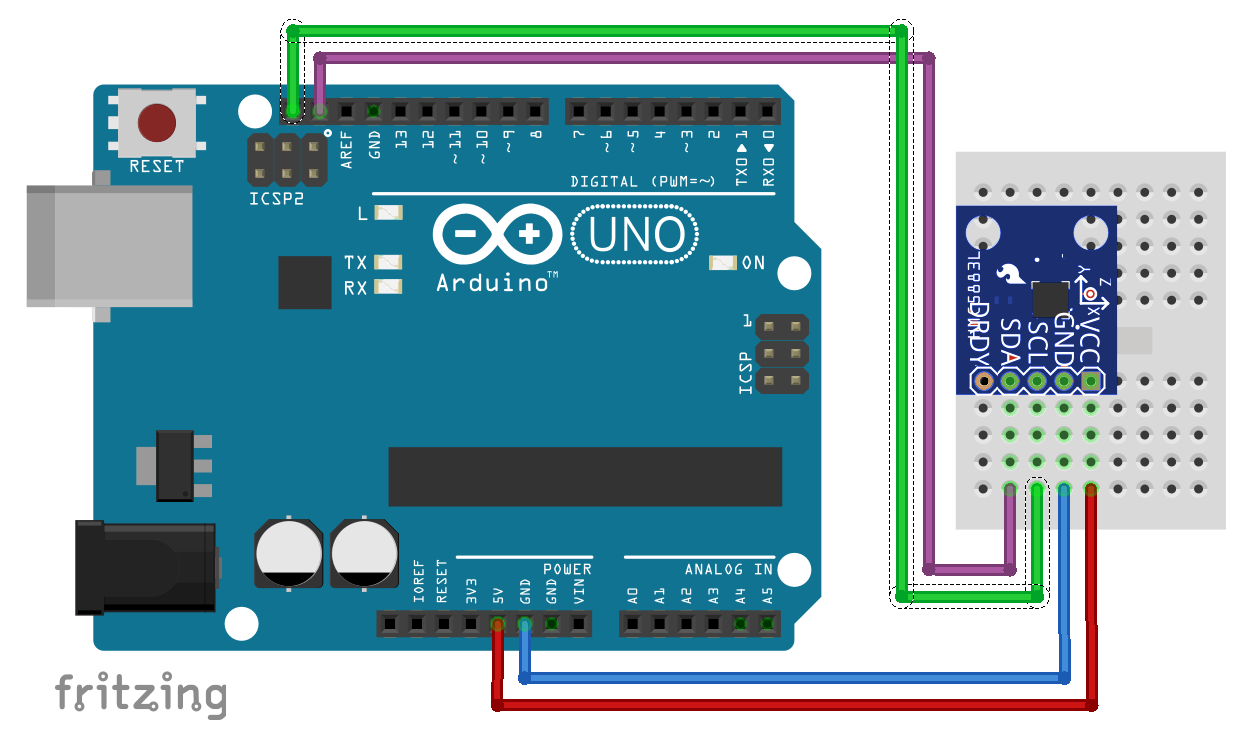
Sensore GY-273 magnetometro a tre assi basato sull'HMC5883L. Impiegato per l'orientamento del robot
Descrizione e caratteristiche del sensore (vedi).
Datasheet del sensore (vedi) e (vedi).
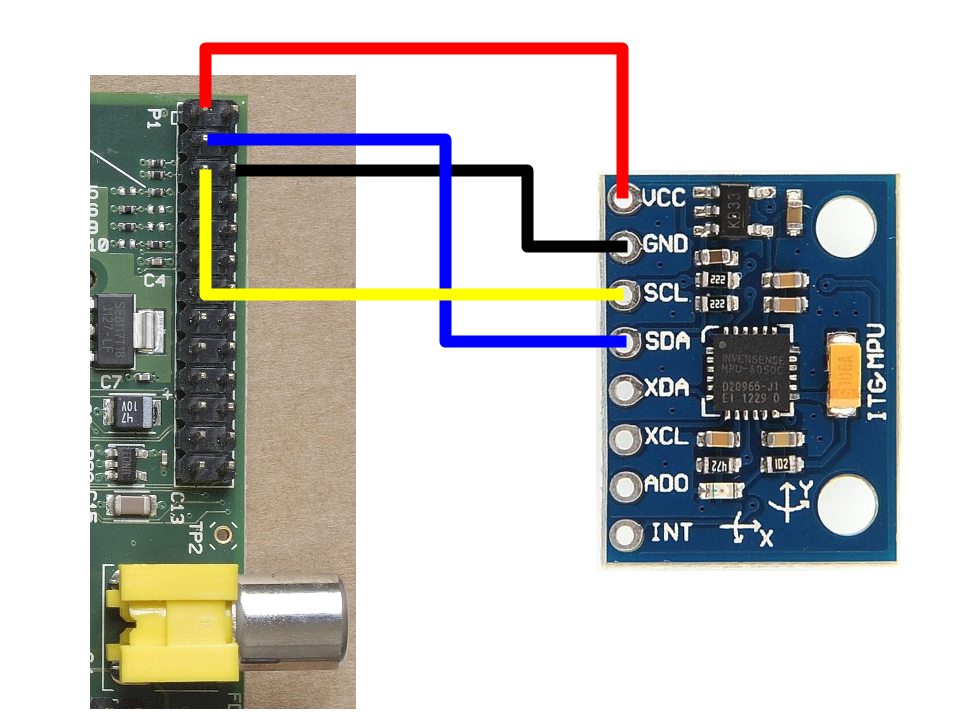
Collegamento con Raspberry (vedi).
{kind=link}
Collegamento con Arduino (vedi).
{kind=link}
Previsto in fase di progettazione iniziale per l'orientamento del robot rispetto la porta, si è valutato di non impiegarlo. Tramite l'algoritmo impiegato che fa uso della visione, il robot riesce a trovare la porta tramite il colore che la contraddistingue.

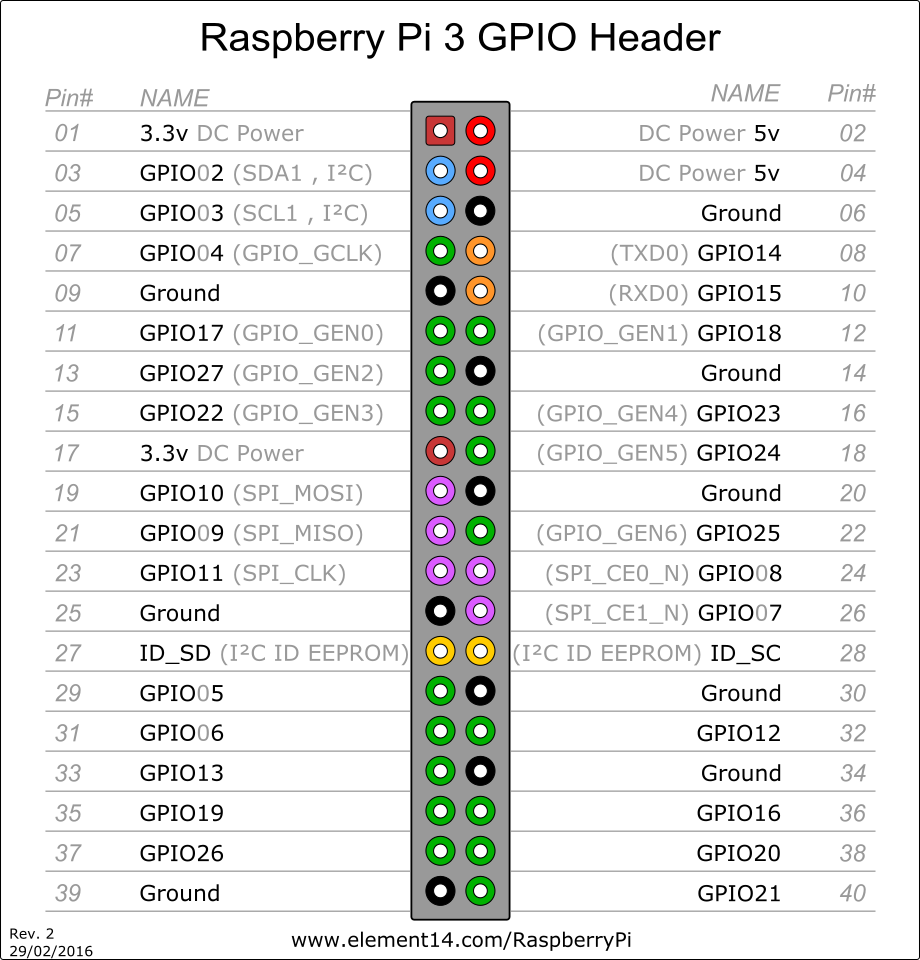
Raspberry PI model B - E' il cervello del robot. Programato in Python 2.7 con l'impiego delle librerie OpenCV 3
Caratteristiche tecniche del dispositivo (vedi). Rivenditore ufficiale RS-Components (vedi)
Sistema operativi per Raspberry (vedi)
Schema dei Gpio del modello Raspberry PI 3 model B (vedi) - (vedi).
{kind=link}

Micro-SD
Installata sul Raspberry, è impiegata per contenere il S.O. Raspian Jessie.
Contiene inoltre il software di gestione del robot (ambiente di programmazione, ecc).
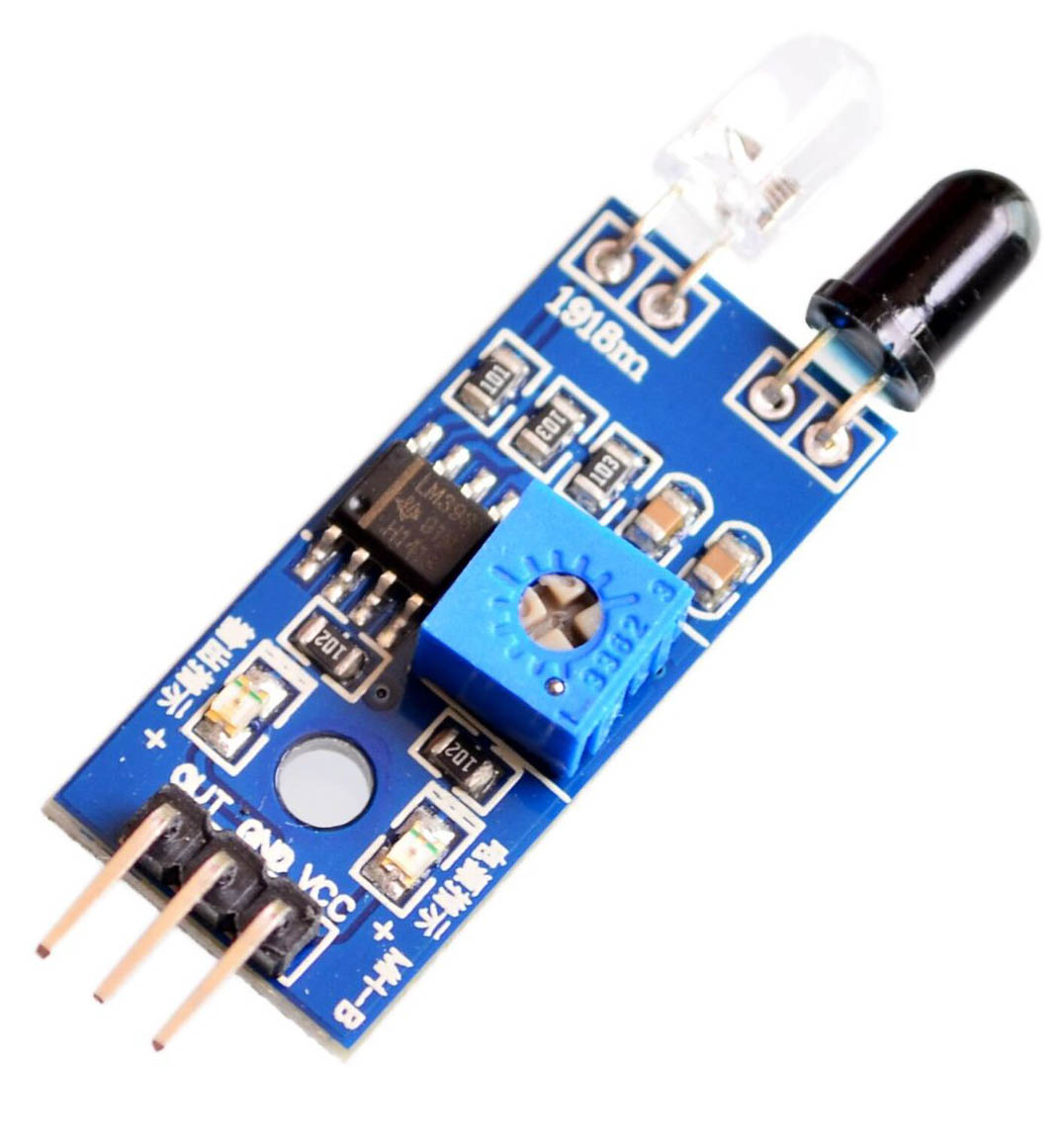
Sensore IR per il rilevamento della pallina all'interno della "chela"
Il collegamento con il raspberry è immediato. Richiede in ingresso i 5V prelevati dalla board.
PowerBank: Fornisce la tensione e la corrente necessaria al funzionamento dell'elettronica del robot.
A questi componenti vanno aggiunte delle vitine, una asta filettata, dei bulloncini, dei cavetti riciclati da vecchi computer e ... tanta pazienza.