
Quando il robot avrà la palla tra la "chela" si è pensato ad un sistema che ne evitasse la fuoriuscita mantenendone però la libertà di rotazione prevista da regolamento.
La soluzione che si è adottata è stata quella di costruire un braccetto mobile tramite un miniservo che si sarebbe abbassato una volta che la pallina si sarebbe trovata tra la "chela" la cui segnalazione sia stata individuata dal sensore IR.
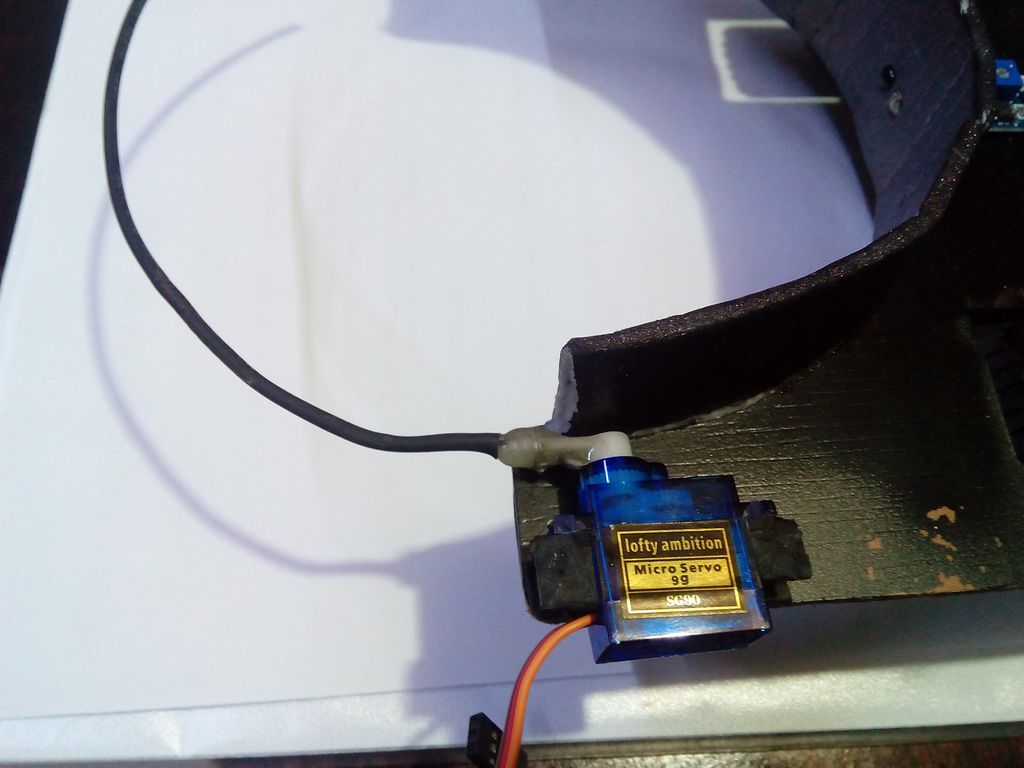
Il braccetto è stato costruito ricavandolo da un gruccia di alluminio (vedi). Quindi è stato piegato per seguire la curvatura della "chela" e per essere inserito nella squadretta del servo. Per migliorare la presa tra braccetto e squadretta si è usato anche del sottile fil di ferro e della colla bicomponente.

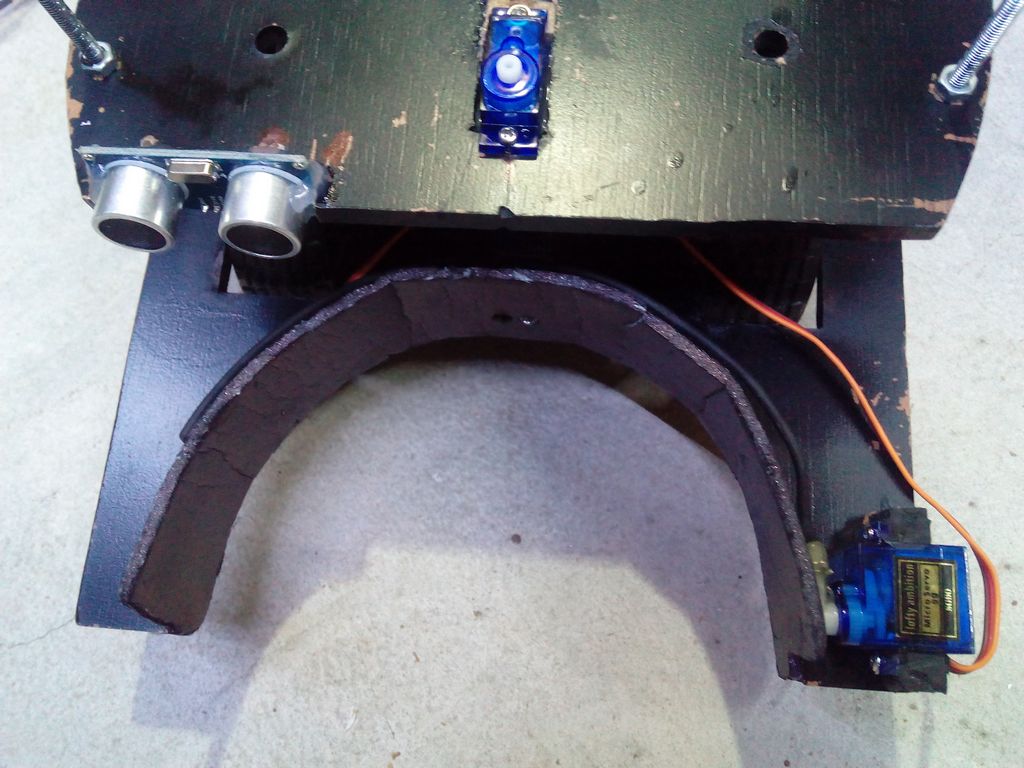
Nella parte frontale sinistra anteriore del pianale inferiore del robot è stato fissato un Miniservo SG90 a cui è stato collegato il braccetto.
Di seguito vista superiore con il braccetto abbassato:

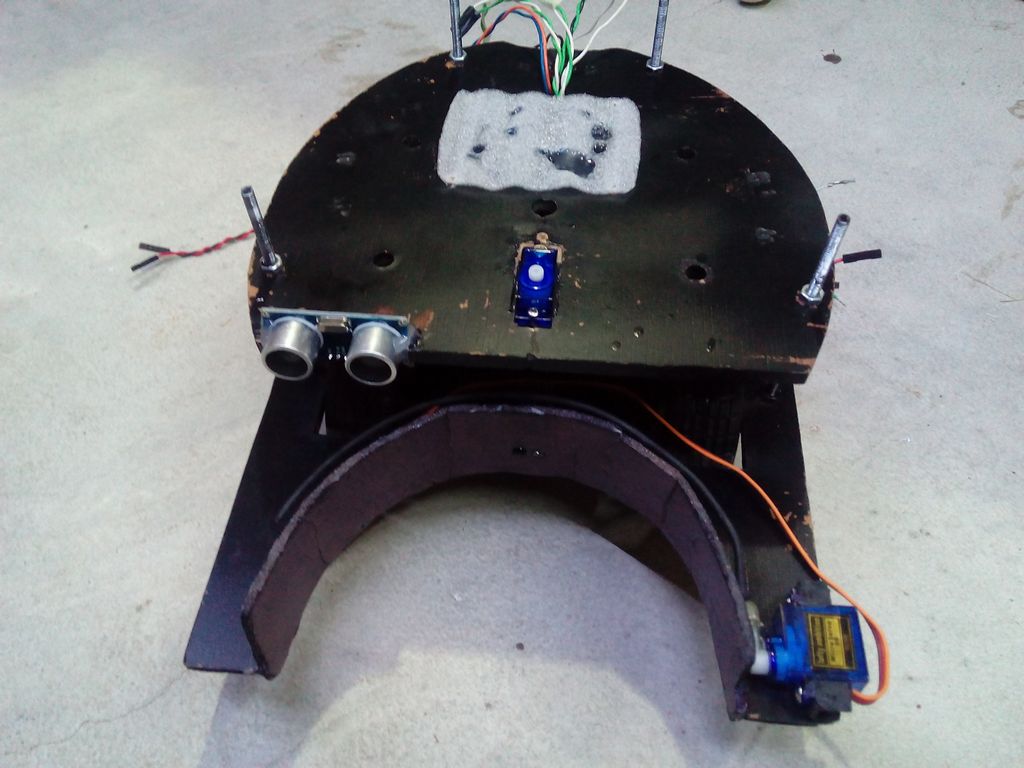
Di seguito vista superiore con il braccetto alzato:
Particolare della posizione assunta dal braccetto alzato: